Arduino to łatwa w użyciu platforma elektroniczna dla hobbystów i początkujących. Składa się z płytki z mikrokontrolerem i środowiska programistycznego IDE. Silnik krokowy to precyzyjny silnik elektryczny, poruszający się w dokładnych krokach. Często stosuje się go w drukarkach 3D i maszynach CNC. Połączenie Arduino z silnikiem krokowym otwiera możliwości tworzenia projektów wymagających dokładnej kontroli ruchu.
Kluczowe informacje:
- Arduino składa się ze sprzętu (płytka) i oprogramowania (IDE)
- Silnik krokowy pozwala na precyzyjne sterowanie ruchem
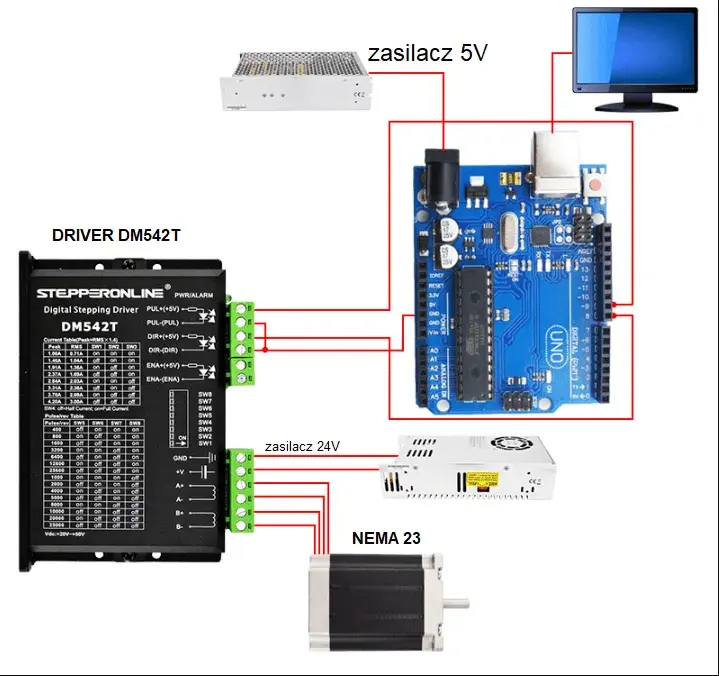
- Do połączenia potrzebne są: Arduino, silnik krokowy, sterownik i zasilacz
- Programowanie odbywa się w języku opartym na C/C++
- Projekty z silnikiem krokowym i Arduino mają wiele zastosowań w robotyce i automatyce
Czym jest Arduino i silnik krokowy?
Arduino to otwarta platforma elektroniczna, składająca się z mikrokontrolera i środowiska programistycznego IDE. Umożliwia łatwe tworzenie interaktywnych projektów elektronicznych, nawet dla początkujących.
Silnik krokowy to precyzyjny napęd elektryczny, obracający się w dokładnie określonych krokach. Jego unikalna konstrukcja pozwala na precyzyjne sterowanie pozycją, prędkością i kierunkiem obrotu. Silniki te są niezastąpione w aplikacjach wymagających dokładnej kontroli ruchu.
Połączenie Arduino i silnika krokowego otwiera szerokie możliwości w dziedzinie automatyki i robotyki. Dzięki temu duetowi można łatwo stworzyć zaawansowane systemy sterowania ruchem, idealne do drukarek 3D, obrabiarek CNC czy robotów.
Niezbędne komponenty do projektu
- Arduino (np. Arduino Uno lub Nano)
- Silnik krokowy (np. NEMA 17)
- Sterownik silnika krokowego (np. A4988 lub DRV8825)
- Zasilacz
- Przewody połączeniowe
- Breadboard (opcjonalnie)
Arduino to mózg operacji, silnik krokowy wykonuje precyzyjne ruchy. Sterownik pośredniczy między nimi, kontrolując prąd i napięcie. Zasilacz dostarcza energię, a przewody łączą wszystkie elementy. Breadboard ułatwia prototypowanie układu.
Czytaj więcej: Jak sprawdzić czy ktoś grzebał w telefonie: Chron swoją prywatność!
Schemat podłączenia silnika krokowego do Arduino
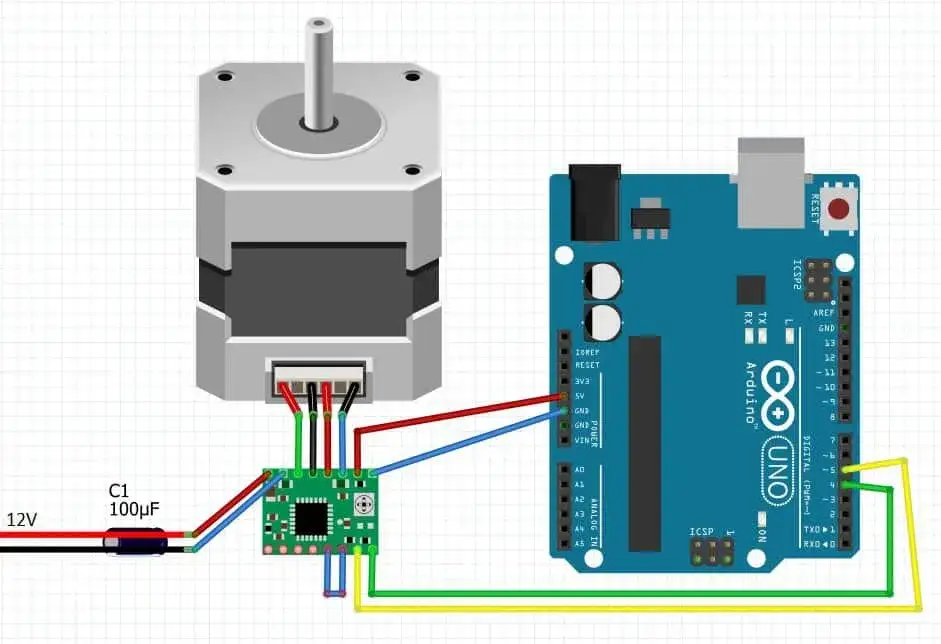
Podłączenie Arduino i silnika krokowego wymaga kilku kluczowych połączeń. Najpierw połącz piny STEP i DIR sterownika z wybranymi pinami cyfrowymi Arduino. Następnie podłącz zasilanie do sterownika, pamiętając o wspólnej masie. Silnik krokowy podłącz do odpowiednich wyjść sterownika. Nie zapomnij o kondensatorze elektrolitycznym między V+ a GND sterownika dla stabilizacji napięcia.
Uważaj na polaryzację połączeń! Złe podłączenie może uszkodzić komponenty. Używaj przewodów o odpowiednim przekroju, szczególnie dla zasilania silnika.
Konfiguracja sterownika silnika
Ustaw mikrokroki za pomocą pinów MS1, MS2 i MS3 na sterowniku. Typowe opcje to pełny krok, półkrok, 1/4 kroku, 1/8 kroku i 1/16 kroku. Więcej mikrokroków oznacza płynniejszy ruch, ale mniejszy moment obrotowy.
Regulacja prądu silnika jest kluczowa. Użyj potencjometru na sterowniku, aby ustawić maksymalny prąd zgodnie ze specyfikacją silnika. Zbyt wysoki prąd może przegrzać silnik, zbyt niski - ograniczy jego moc.
Programowanie Arduino do sterowania silnikiem krokowym
Struktura kodu do sterowania silnikiem krokowym składa się z trzech głównych części: konfiguracji pinów, funkcji setup() i głównej pętli loop(). W setup() ustawiamy piny jako wyjścia, a w loop() implementujemy logikę sterowania.
Oto przykładowy kod sterujący:
const int stepPin = 3;
const int dirPin = 2;
void setup() {
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop() {
digitalWrite(dirPin, HIGH); // Kierunek zgodny z ruchem wskazówek zegara
for(int x = 0; x < 200; x++) {
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000); // Pauza przed zmianą kierunku
}
Funkcja digitalWrite() kontroluje piny STEP i DIR. Pętla for generuje impulsy dla określonej liczby kroków. Funkcja delayMicroseconds() reguluje prędkość silnika. Zmiana stanu pinu dirPin określa kierunek obrotu.
Kontrola prędkości i kierunku obrotu
Prędkość silnika regulujemy, zmieniając czas między impulsami STEP. Krótsze opóźnienia oznaczają szybszy obrót. Można też użyć biblioteki AccelStepper dla zaawansowanej kontroli prędkości, w tym płynnego przyspieszania i hamowania.
Zmiana kierunku obrotu to prosta operacja - wystarczy zmienić stan pinu DIR. HIGH dla jednego kierunku, LOW dla przeciwnego.
Testowanie i kalibracja układu
Pierwsze uruchomienie wymaga ostrożności. Zacznij od niskiej prędkości i małej liczby kroków. Obserwuj reakcję silnika i nasłuchuj nietypowych dźwięków. Stopniowo zwiększaj parametry, aż osiągniesz pożądaną wydajność. Pamiętaj o kontroli temperatury silnika i sterownika.
Typowe problemy to drgania silnika, utrata kroków lub przegrzewanie. Drgania często wynikają z rezonansu - spróbuj zmienić prędkość. Utrata kroków może oznaczać zbyt niski prąd lub zbyt wysoką prędkość. Przegrzewanie sugeruje zbyt wysoki prąd lub niewystarczające chłodzenie.
- Zawsze odłączaj zasilanie przed zmianami w układzie
- Uważaj na gorące powierzchnie sterownika i silnika
- Nie przekraczaj maksymalnych wartości prądu i napięcia komponentów
- Używaj odpowiednich radiatorów dla sterowników
- Zabezpiecz ruchome części mechaniczne
Zastosowania Arduino i silnika krokowego
| Projekt | Opis |
|---|---|
| Drukarka 3D | Precyzyjne sterowanie ruchem głowicy drukującej w trzech osiach |
| Teleskop automatyczny | Dokładne śledzenie obiektów na niebie |
| Robot rysujący | Konwersja obrazów cyfrowych na rysunki |
| Automatyczny podajnik | Kontrolowane dozowanie materiałów w przemyśle |
| CNC hobby | Amatorska obrabiarka do precyzyjnego cięcia i grawerowania |
Zaawansowane techniki sterowania
Płynny rozruch i hamowanie to klucz do wydajnej pracy. Stopniowo zwiększaj częstotliwość impulsów STEP na początku ruchu i zmniejszaj na końcu. To redukuje wibracje i zużycie mechaniczne, poprawiając dokładność pozycjonowania.
Precyzyjne pozycjonowanie wymaga użycia enkoderów lub czujników krańcowych. Zaimplementuj algorytm korekcji błędów, który porównuje rzeczywistą pozycję z zadaną i wprowadza niezbędne korekty. To kluczowe w aplikacjach wymagających submilimetrowej dokładności.
Optymalizacja wydajności układu
Dobór zasilacza jest krytyczny. Używaj stabilnego źródła o napięciu i prądzie dostosowanym do silnika i sterownika. Większe napięcie pozwala na wyższe prędkości, ale zwiększa ryzyko przegrzania.
Chłodzenie to podstawa długotrwałej pracy. Stosuj radiatory na sterownikach i wentylatory dla silników pracujących pod dużym obciążeniem. Monitoruj temperaturę kluczowych komponentów.
Redukcja zakłóceń EMI jest niezbędna dla stabilnej pracy. Używaj skręconych par przewodów dla sygnałów różnicowych. Zastosuj kondensatory blokujące blisko sterownika. W razie potrzeby, użyj ferrytów na przewodach zasilających i sygnałowych dla dodatkowej filtracji.
Rozszerzanie możliwości projektu
Enkodery to doskonałe uzupełnienie sterowania silnikiem krokowym. Podłącz enkoder inkrementalny do pinów przerwań Arduino. Pozwoli to na weryfikację rzeczywistej pozycji silnika i korekcję błędów wynikających z utraty kroków.
Integracja czujników poszerza funkcjonalność. Czujniki krańcowe zabezpieczą przed przekroczeniem zakresu ruchu. Czujniki zbliżeniowe umożliwią automatyczne pozycjonowanie. Czujniki temperatury ochronią silnik przed przegrzaniem.
Sterowanie przez interfejs użytkownika to kolejny krok w rozwoju projektu. Wykorzystaj wyświetlacz LCD i przyciski do lokalnej kontroli. Alternatywnie, zaimplementuj komunikację Bluetooth lub Wi-Fi dla zdalnego sterowania z aplikacji mobilnej.Klucz do precyzyjnego ruchu: Arduino i silnik krokowy w praktyce
Arduino i silnik krokowy to duet, który otwiera drzwi do świata precyzyjnej automatyki i robotyki. Dzięki prostocie Arduino i dokładności silników krokowych, nawet początkujący entuzjaści mogą tworzyć zaawansowane projekty sterowania ruchem.
Od podstawowego podłączenia, przez programowanie, aż po zaawansowane techniki sterowania - artykuł przeprowadza czytelnika przez wszystkie etapy tworzenia funkcjonalnego układu. Kluczowe aspekty, takie jak konfiguracja sterownika, optymalizacja wydajności czy rozwiązywanie typowych problemów, pozwalają na uniknięcie pułapek i osiągnięcie sukcesu w realizacji projektu.
Pamiętaj, że praktyka czyni mistrza. Eksperymentuj z różnymi ustawieniami, testuj granice możliwości swojego układu i nie bój się wyzwań. Każdy problem to okazja do nauki. Z czasem odkryjesz, że połączenie Arduino i stepper motora to nie tylko sposób na realizację konkretnych zadań, ale także fascynująca podróż w świat precyzyjnego sterowania silnikiem i kreatywnej inżynierii.