Tworzenie robota na platformie Arduino to fascynujące wyzwanie dla pasjonatów elektroniki i programowania. Proces ten składa się z trzech głównych etapów: wyboru komponentów, montażu oraz programowania. Kluczowe elementy to mikrokontroler (najczęściej Arduino Uno), silniki (DC, serwomechanizmy lub krokowe), czujniki oraz źródło zasilania. Budowa robota wymaga nie tylko wiedzy technicznej, ale także kreatywności i cierpliwości.
Programowanie odbywa się w środowisku Arduino IDE, gdzie tworzy się kod sterujący robotem. Testowanie i debugowanie to nieodłączne części procesu, pozwalające na dopracowanie projektu. Możliwości rozbudowy robota są praktycznie nieograniczone - od dodawania nowych czujników po implementację modułów komunikacyjnych.
Najważniejsze informacje:- Arduino Uno to najpopularniejszy mikrokontroler dla początkujących
- Wybór silników zależy od planowanych funkcji robota
- Czujniki umożliwiają robotowi interakcję z otoczeniem
- Programowanie odbywa się w Arduino IDE
- Testowanie i debugowanie to kluczowe etapy tworzenia robota
- Projekt można rozszerzać o dodatkowe moduły i funkcje
Wybór komponentów do robota Arduino
Jak zrobić robota Arduino to pytanie, które często zadają początkujący entuzjaści elektroniki. Kluczowym etapem jest wybór odpowiednich komponentów. Serce robota stanowi mikrokontroler Arduino, najczęściej model Uno, ze względu na jego wszechstronność i łatwość obsługi. Silniki zapewniają ruch, a czujniki umożliwiają interakcję z otoczeniem.
Wybierając elementy do konstrukcji robota na Arduino, warto zwrócić uwagę na ich kompatybilność i możliwości rozbudowy. Należy również uwzględnić planowane funkcje robota - czy ma to być prosty pojazd, czy może bardziej zaawansowany manipulator. Pamiętajmy, że dobór odpowiednich komponentów znacząco wpłynie na końcowe możliwości naszego projektu.
Zasilanie to często pomijany, ale niezwykle istotny element projektu robota Arduino. Akumulatory litowo-polimerowe są popularne ze względu na ich pojemność i niewielkie rozmiary. Jednak dla prostszych projektów wystarczą baterie AA lub pakiet power bank.
- Mikrokontroler Arduino Uno - mózg robota, prosty w programowaniu
- Silniki DC - zapewniają podstawowy ruch, idealne do prostych robotów mobilnych
- Serwomechanizmy - umożliwiają precyzyjne sterowanie, np. ramieniem robota
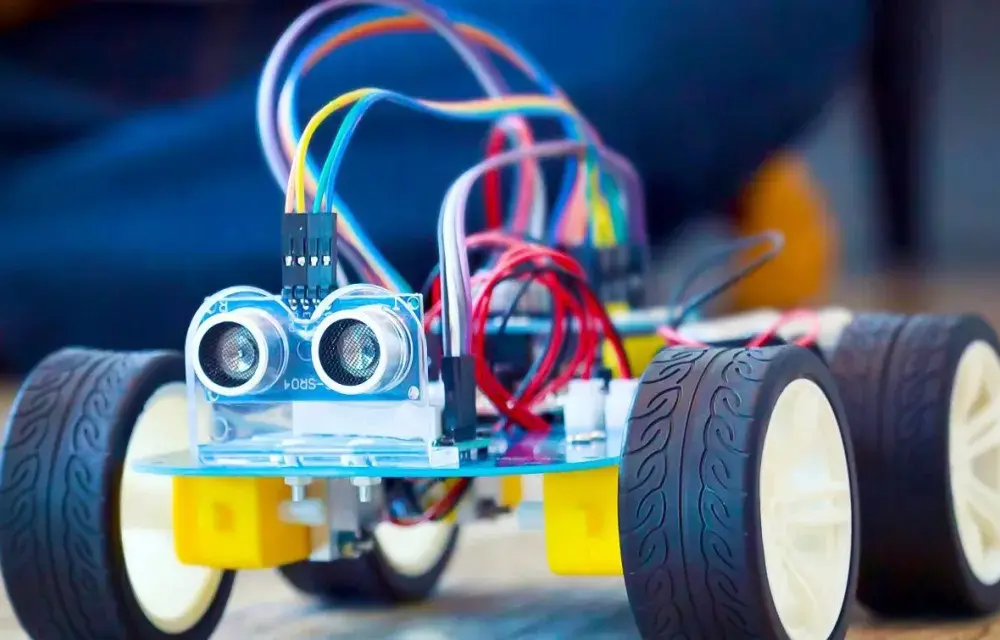
- Czujnik ultradźwiękowy HC-SR04 - pozwala na wykrywanie przeszkód
- Moduł L298N - sterownik silników, ułatwia kontrolę nad napędem
Mikrokontroler Arduino - serce twojego robota
Arduino to platforma, która zrewolucjonizowała świat elektroniki hobbystycznej. Arduino DIY robot to projekt, który możesz zrealizować, wykorzystując różne modele tej platformy. Arduino Uno, ze względu na swoją wszechstronność, jest najczęściej wybieranym modelem dla początkujących.
Dla bardziej zaawansowanych projektów warto rozważyć Arduino Mega, które oferuje więcej pinów i pamięci. Z kolei Arduino Nano sprawdzi się w kompaktowych konstrukcjach. Wybór odpowiedniego modelu zależy od złożoności projektu i wymaganych funkcji.
| Model | Cechy | Zalety | Wady |
|---|---|---|---|
| Arduino Uno | 14 pinów cyfrowych, 6 analogowych | Wszechstronność, duża społeczność | Ograniczona pamięć |
| Arduino Mega | 54 piny cyfrowe, 16 analogowych | Duża liczba pinów, więcej pamięci | Większe rozmiary, wyższa cena |
| Arduino Nano | 22 piny, małe rozmiary | Kompaktowość, niskie zużycie energii | Mniej pinów, trudniejsze lutowanie |
Czytaj więcej: Jak sprawdzić GB w Plusie: Kontroluj swoje zużycie danych!
Silniki i układy napędowe - jak wybrać odpowiednie?
Wybór silników to kluczowy element instrukcji robota Arduino. Silniki DC są najprostsze w użyciu i idealne do podstawowych projektów mobilnych. Serwomechanizmy zapewniają precyzyjne sterowanie, co jest przydatne w robotach manipulatorach lub przy sterowaniu kamerą.
Silniki krokowe oferują dokładną kontrolę ruchu, ale wymagają bardziej skomplikowanego sterowania. Są często stosowane w drukarkach 3D i innych precyzyjnych maszynach. Wybór zależy od specyfiki projektu i wymaganej dokładności ruchu.
Pamiętaj, że silniki potrzebują odpowiedniego sterowania. Moduły takie jak L298N czy TB6612FNG ułatwiają kontrolę silników DC i krokowych. Dla serwomechanizmów zwykle wystarczy bezpośrednie podłączenie do Arduino.
- Silniki DC - proste pojazdy, roboty odkurzające
- Serwomechanizmy - ramiona robotów, sterowanie kamerą
- Silniki krokowe - precyzyjne pozycjonowanie, np. w ploterach
Czujniki - oczy i uszy twojego robota
Czujniki są kluczowe dla interakcji robota z otoczeniem. Jak zbudować robota z Arduino, który będzie reagował na środowisko? Ultradźwiękowe czujniki odległości, takie jak HC-SR04, pozwalają na wykrywanie przeszkód. Czujniki światła umożliwiają robotowi podążanie za linią lub reagowanie na zmiany oświetlenia.
Bardziej zaawansowane projekty mogą wykorzystywać akcelerometry do wykrywania orientacji robota lub czujniki temperatury do monitorowania otoczenia. Wybór czujników zależy od funkcji, jakie chcemy, aby nasz robot wykonywał.
- HC-SR04 - ultradźwiękowy czujnik odległości, idealny do wykrywania przeszkód
- LDR - czujnik światła, przydatny w robotach śledzących linię
- MPU-6050 - akcelerometr i żyroskop, do określania orientacji robota
- DHT11 - czujnik temperatury i wilgotności, do monitorowania warunków otoczenia
- IR Sensor - czujnik podczerwieni, do wykrywania przeszkód lub zdalnego sterowania
Zasilanie robota - baterie i akumulatory
Wybór odpowiedniego zasilania jest kluczowy dla programowania robota Arduino. Baterie alkaliczne AA są łatwo dostępne, ale mają ograniczoną pojemność. Akumulatory litowo-polimerowe (Li-Po) oferują wysoką pojemność przy małych rozmiarach, co jest idealne dla mobilnych robotów.
Pamiętaj o napięciu wymaganym przez Arduino (zwykle 5V) oraz silniki (często 6-12V). Power banki mogą być dobrym rozwiązaniem dla projektów wymagających dłuższego czasu pracy. Zawsze uwzględniaj pobór prądu przez wszystkie komponenty, aby dobrać odpowiednie źródło zasilania.
Montaż robota Arduino krok po kroku
Jak zrobić robota Arduino? Zacznij od solidnego planu. Narysuj schemat robota, uwzględniając rozmieszczenie wszystkich komponentów. Upewnij się, że masz wszystkie potrzebne części i narzędzia pod ręką.
Montaż zacznij od konstrukcji ramy. Może to być prosta platforma z płyty PCB lub bardziej złożona struktura drukowana 3D. Pamiętaj o stabilności - robot musi utrzymać równowagę podczas ruchu.
Kolejnym krokiem jest montaż silników i kół. Upewnij się, że są solidnie przymocowane i mogą się swobodnie obracać. Prawidłowe ustawienie napędu jest kluczowe dla sprawnego poruszania się robota.
Teraz czas na elektronikę. Zamontuj Arduino w centralnym miejscu, z łatwym dostępem do pinów. Podłącz silniki do sterownika, a sterownik do Arduino. Czujniki rozmieść strategicznie, aby zapewnić robotowi "zmysły". Na koniec podłącz zasilanie, pamiętając o zabezpieczeniu przed zwarciem.
- Przygotuj plan i schemat robota
- Zbuduj ramę lub platformę
- Zamontuj silniki i koła
- Zainstaluj Arduino i sterownik silników
- Podłącz i rozmieść czujniki
- Przeprowadź okablowanie
- Podłącz zasilanie i zabezpiecz układ
Przygotowanie ramy i platformy robota
Rama to szkielet twojego Arduino DIY robota. Możesz użyć gotowych zestawów lub stworzyć własną konstrukcję. Płyta PCB, pleksiglas czy druk 3D - każde rozwiązanie ma swoje zalety.
Pamiętaj o wadze i rozkładzie masy. Ciężkie elementy, jak baterie, umieść nisko i centralnie. To zapewni stabilność. Zostaw miejsce na przyszłe modyfikacje - twój robot z pewnością będzie ewoluował!
Montaż silników i kół
Precyzyjne zamocowanie silników to klucz do płynnego ruchu robota. Użyj solidnych uchwytów i śrub odpowiedniej wielkości. Upewnij się, że wały silników są równoległe do podłoża.
Koła powinny być dopasowane do powierzchni, po której robot będzie się poruszał. Gumowe opony zapewnią lepszą przyczepność na gładkich powierzchniach. Pamiętaj o kole podporowym lub kulce - to ważne dla stabilności trójkołowego robota.
Instalacja czujników i innych komponentów
Rozmieszczenie czujników wpływa na funkcjonalność robota Arduino. Czujniki odległości umieść z przodu, aby wykrywać przeszkody. Czujniki światła na dole przydadzą się do śledzenia linii.
Zadbaj o czystość połączeń. Użyj złączy lub lutowania, unikając prowizorycznych rozwiązań. Zabezpiecz delikatne elementy przed wibracjami i uderzeniami. Dobra organizacja okablowania ułatwi przyszłe modyfikacje i debugowanie.
Podstawy programowania Arduino dla początkujących
Programowanie robota Arduino zaczyna się od zrozumienia podstaw. Arduino IDE to intuicyjne środowisko, gdzie będziesz pisać i wgrywać kod. Zacznij od prostych programów, jak migająca dioda LED, aby oswoić się z procesem.
Kluczowe w Arduino są funkcje setup() i loop(). setup() wykonuje się raz na początku, a loop() ciągle się powtarza. To w nich będziesz umieszczać główną logikę swojego robota.
Zmienne, pętle i instrukcje warunkowe to podstawowe elementy każdego programu. W Arduino często będziesz korzystać z funkcji digitalRead() i digitalWrite() do obsługi pinów, oraz analogRead() i analogWrite() do pracy z sygnałami analogowymi.
- Struktura programu - setup() i loop()
- Zmienne - przechowywanie i manipulacja danymi
- Pętle - for, while do powtarzania akcji
- Instrukcje warunkowe - if, else do podejmowania decyzji
- Funkcje - organizacja kodu i jego ponowne użycie
Struktura programu Arduino
Każdy program Arduino ma dwie główne funkcje: setup() i loop(). setup() wykonuje się raz, gdy Arduino startuje. To miejsce na inicjalizację pinów i ustawień początkowych.
loop() to serce programu, wykonujące się w nieskończonej pętli. Tu umieszczasz główną logikę działania robota. Pamiętaj o delay() lub millis() do kontrolowania czasu wykonania poszczególnych akcji.
Przykładowy kod sterujący silnikami
Oto prosty przykład kodu sterującego dwoma silnikami DC w robocie Arduino. Wykorzystujemy bibliotekę AFMotor do łatwiejszej kontroli. Pamiętaj o dostosowaniu pinów i wartości do swojego projektu.
```cpp #includeOdczytywanie danych z czujników - przykłady
Odczytywanie danych z czujników to podstawa interakcji robota Arduino z otoczeniem. Poni ższy kod pokazuje, jak odczytać dane z czujnika ultradźwiękowego HC-SR04 i wykorzystać je do unikania przeszkód.
```cpp #define TRIG_PIN 9 #define ECHO_PIN 10 void setup() { Serial.begin(9600); pinMode(TRIG_PIN, OUTPUT); pinMode(ECHO_PIN, INPUT); } void loop() { long duration, distance; digitalWrite(TRIG_PIN, LOW); delayMicroseconds(2); digitalWrite(TRIG_PIN, HIGH); delayMicroseconds(10); digitalWrite(TRIG_PIN, LOW); duration = pulseIn(ECHO_PIN, HIGH); distance = (duration / 2) / 29.1; // Przeliczenie na cm Serial.print("Odległość: "); Serial.print(distance); Serial.println(" cm"); delay(500); } ```Testowanie i debugowanie robota Arduino
Testowanie to kluczowy etap w instrukcji robota Arduino. Zacznij od prostych testów każdego komponentu osobno. Sprawdź, czy silniki obracają się we właściwym kierunku, a czujniki prawidłowo odczytują dane.
Debugowanie często wymaga cierpliwości. Używaj Serial.print() do wyświetlania wartości zmiennych i stanów czujników. To pomoże zidentyfikować problemy w kodzie. Nie zapominaj o sprawdzeniu połączeń - luźny przewód może powodować nieoczekiwane zachowania.
Testuj robota w różnych warunkach. Jeśli ma unikać przeszkód, sprawdź jego reakcje na różne materiały i kształty. Dla robotów śledzących linię, przetestuj różne powierzchnie i kolory. Systematyczne podejście do testów pomoże szybko wykryć i naprawić błędy.
- Niedziałające silniki - sprawdź połączenia i zasilanie, przetestuj każdy silnik osobno
- Nieprawidłowe odczyty czujników - zweryfikuj podłączenie i kod, użyj Serial.print() do debugowania
- Robot nie reaguje na przeszkody - sprawdź czujnik odległości, dostosuj progi reakcji w kodzie
- Niestabilne zachowanie - może wynikać z problemów z zasilaniem, sprawdź baterie lub stabilizację napięcia
- Przegrzewanie się komponentów - zweryfikuj pobór prądu, dodaj radiatory jeśli potrzebne
Rozszerzanie funkcjonalności robota
Jak zrobić robota Arduino bardziej zaawansowanego? Możliwości rozbudowy są niemal nieograniczone. Dodanie modułu Bluetooth pozwoli na sterowanie robotem za pomocą smartfona. Kamera i moduł rozpoznawania obrazu otworzą drzwi do projektów z zakresu wizji komputerowej.
Rozważ dodanie wyświetlacza LCD do pokazywania statusu robota lub odczytów z czujników. Moduł GPS umożliwi nawigację w terenie. Pamiętaj, że każde rozszerzenie wymaga odpowiedniego dostosowania kodu i często dodatkowego zasilania.
- Moduł Bluetooth HC-05 - umożliwia bezprzewodową komunikację ze smartfonem
- Kamera OV7670 - dodaje możliwość przechwytywania obrazu, przydatna w projektach wizji komputerowej
- Wyświetlacz LCD 16x2 - pozwala na wyświetlanie informacji o stanie robota
- Moduł GPS NEO-6M - umożliwia określanie pozycji geograficznej, idealne do robotów outdoorowych
Twój pierwszy robot Arduino - od koncepcji do realizacji
Jak zrobić robota Arduino to fascynująca przygoda, która łączy w sobie elementy elektroniki, mechaniki i programowania. Zaczynając od wyboru odpowiednich komponentów, przez montaż, aż po programowanie i testowanie, każdy etap jest kluczowy dla sukcesu projektu. Pamiętaj, że serce twojego robota - mikrokontroler Arduino - oferuje niemal nieograniczone możliwości rozbudowy i modyfikacji.Kluczem do udanej konstrukcji robota na Arduino jest stopniowe podejście. Zacznij od prostego projektu, na przykład robota omijającego przeszkody, a następnie rozbudowuj go o kolejne funkcje. Nie zniechęcaj się początkowymi trudnościami - każdy problem to okazja do nauki. Pamiętaj o testowaniu każdego komponentu osobno przed połączeniem wszystkiego w całość.
Społeczność Arduino jest ogromna i pomocna. Nie wahaj się szukać inspiracji w projektach innych twórców czy prosić o pomoc na forach. Programowanie robota Arduino to umiejętność, którą zdobywa się z czasem, więc bądź cierpliwy i wytrwały. Z każdym kolejnym projektem twoje umiejętności będą rosły, otwierając drogę do coraz bardziej zaawansowanych konstrukcji.