Interfejs UART w ATmega8 to kluczowy element komunikacji szeregowej w tym popularnym mikrokontrolerze. Artykuł przedstawia prosty przykład kodu w języku C, który pokazuje jak skonfigurować i używać UART w ATmega8. Główne elementy to inicjalizacja UART, odbieranie i wysyłanie danych. Kod demonstruje podstawowe ustawienia, takie jak prędkość transmisji, liczba bitów danych i bitów stopu.
Przykład zawiera funkcje do inicjalizacji UART, odbierania i wysyłania pojedynczych znaków. W głównej pętli programu pokazano, jak cyklicznie wysyłać znak 'A' co sekundę. To prosty, ale skuteczny sposób na rozpoczęcie pracy z komunikacją szeregową w projektach opartych na ATmega8.
Kluczowe informacje:- Kod pokazuje konfigurację UART dla ATmega8
- Zawiera funkcje do inicjalizacji, odbierania i wysyłania danych
- Demonstruje ustawienie prędkości transmisji i parametrów ramki
- Przykład wysyła cyklicznie znak 'A' co sekundę
- Stanowi dobrą podstawę do rozbudowy o bardziej zaawansowane funkcje
Wprowadzenie do komunikacji UART w ATmega8
UART (Universal Asynchronous Receiver-Transmitter) to kluczowy interfejs komunikacji szeregowej w mikrokontrolerach. Umożliwia on wymianę danych między urządzeniami bez konieczności synchronizacji zegarem.
ATmega8 to popularny mikrokontroler z rodziny AVR, wyposażony w zintegrowany moduł UART. Oferuje on elastyczną konfigurację parametrów transmisji, co czyni go idealnym wyborem dla projektów wymagających niezawodnej komunikacji szeregowej.
Konfiguracja UART w ATmega8
Ustawienia rejestrów
Konfiguracja UART w ATmega8 wymaga odpowiedniego ustawienia kilku kluczowych rejestrów. Rejestry te kontrolują prędkość transmisji, format ramki danych oraz włączenie nadajnika i odbiornika. Prawidłowe skonfigurowanie tych rejestrów jest niezbędne do zapewnienia poprawnej komunikacji.
- UBRR (USART Baud Rate Register) - ustawia prędkość transmisji
- UCSRA (USART Control and Status Register A) - zawiera flagi statusu transmisji
- UCSRB (USART Control and Status Register B) - włącza nadajnik i odbiornik
- UCSRC (USART Control and Status Register C) - konfiguruje format ramki
- UDR (USART Data Register) - bufor danych do wysyłania i odbierania
Parametry transmisji
Typowe parametry transmisji UART obejmują prędkość (baud rate), liczbę bitów danych, bity stopu oraz opcjonalną kontrolę parzystości. ATmega8 pozwala na elastyczne dostosowanie tych parametrów do wymagań projektu. Najczęściej stosowane konfiguracje to 8 bitów danych, brak kontroli parzystości i 1 bit stopu.
| Konfiguracja | Prędkość (bps) | Bity danych | Parzystość | Bity stopu |
|---|---|---|---|---|
| Standardowa | 9600 | 8 | Brak | 1 |
| Szybka | 115200 | 8 | Brak | 1 |
| Z parzystością | 19200 | 8 | Even | 1 |
Czytaj więcej: Mont Blanc Zegarki: Elegancja i precyzja na twoim nadgarstku!
Implementacja kodu UART w języku C
Inicjalizacja UART
Funkcja inicjalizująca UART konfiguruje wszystkie niezbędne rejestry. Ustawia ona prędkość transmisji, włącza nadajnik i odbiornik oraz definiuje format ramki danych.
```c void USART_Init(unsigned int ubrr) { UBRRH = (unsigned char)(ubrr>>8); // Ustawienie starszego bajtu UBRR UBRRL = (unsigned char)ubrr; // Ustawienie młodszego bajtu UBRR UCSRB = (1<Dla implementacji UART w mikrokontrolerze AVR kluczowe są funkcje do wysyłania i odbierania pojedynczych bajtów. Funkcja wysyłająca czeka na opróżnienie bufora nadawczego, a następnie umieszcza dane w rejestrze UDR. Funkcja odbierająca oczekuje na otrzymanie danych i zwraca zawartość rejestru UDR.
```c void USART_Transmit(unsigned char data) { while (!(UCSRA & (1<Ten program demonstruje podstawową komunikację szeregową ATmega8. Po inicjalizacji UART, mikrokontroler cyklicznie wysyła znak 'A', co pozwala na łatwe sprawdzenie poprawności konfiguracji i działania interfejsu UART.
- Zawsze sprawdzaj, czy ustawiona prędkość transmisji jest zgodna z możliwościami odbiornika.
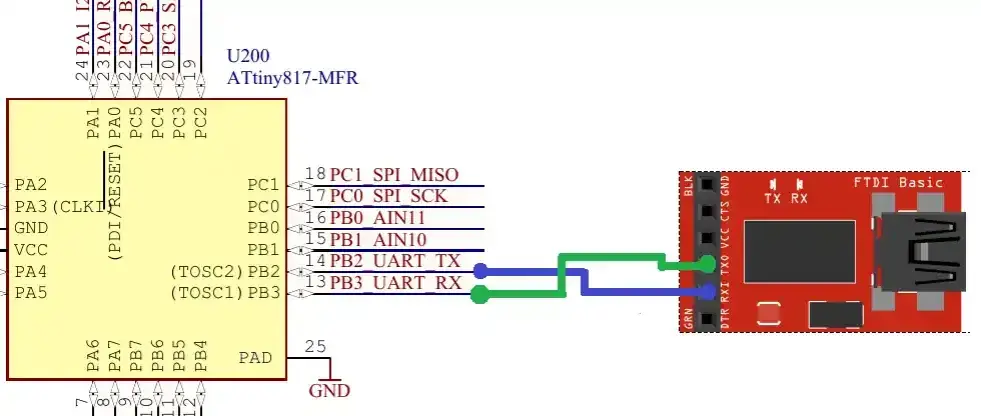
- Pamiętaj o prawidłowym podłączeniu linii TX i RX między urządzeniami.
- Użyj zewnętrznego oscylatora dla bardziej precyzyjnej synchronizacji, szczególnie przy wyższych prędkościach transmisji.
- Rozważ użycie przerwań do obsługi UART w bardziej zaawansowanych aplikacjach.
Debugowanie i rozwiązywanie problemów
Typowe problemy z komunikacją UART
- Nieprawidłowa prędkość transmisji - powoduje nieczytelne dane.
- Błędna konfiguracja bitów danych lub stopu - skutkuje utratą synchronizacji.
- Niepoprawne podłączenie linii TX/RX - uniemożliwia komunikację.
- Konflikt z innymi peryferiami - może prowadzić do zakłóceń transmisji.
- Przepełnienie bufora odbiorczego - powoduje utratę danych.
Metody debugowania
Oscyloskop cyfrowy pozwala na wizualizację sygnałów UART, co umożliwia wykrycie problemów z timingiem lub poziomami napięć. To niezastąpione narzędzie przy troubleshootingu.
Terminal szeregowy na komputerze umożliwia monitorowanie przesyłanych danych w czasie rzeczywistym. Pomaga w weryfikacji poprawności transmisji i szybkim wykrywaniu błędów.
Diody LED podłączone do linii TX/RX mogą służyć jako prosty wskaźnik aktywności UART. To tania i szybka metoda sprawdzenia, czy transmisja w ogóle zachodzi.
Zaawansowane techniki UART w ATmega8
Buforowanie programowe zwiększa wydajność UART, pozwalając na obsługę większej ilości danych bez blokowania. Implementacja bufora cyklicznego umożliwia płynną transmisję nawet przy intensywnym ruchu danych.
Przerwania UART odciążają główną pętlę programu, umożliwiając asynchroniczną obsługę komunikacji. Pozwala to na efektywniejsze wykorzystanie czasu procesora, szczególnie w systemach wielozadaniowych.
```c ISR(USART_RXC_vect) { char receivedChar = UDR; // Odczyt otrzymanego znaku // Przetwarzanie otrzymanego znaku if (receivedChar == 'X') { // Wykonaj akcję dla znaku 'X' } } ```
Podsumowanie i dalsze kroki
Przykładowy kod UART dla ATmega8 stanowi solidną podstawę do rozpoczęcia pracy z komunikacją szeregową w mikrokontrolerach AVR. Prawidłowa konfiguracja rejestrów, implementacja funkcji nadawania i odbierania oraz zrozumienie typowych problemów są kluczowe dla sukcesu projektu. Zastosowanie zaawansowanych technik, takich jak buforowanie i przerwania, pozwala na tworzenie bardziej złożonych i wydajnych aplikacji.
Dla dalszego rozwoju umiejętności w programowaniu UART ATmega8, warto zgłębić tematy takie jak komunikacja z różnymi urządzeniami peryferyjnymi czy implementacja protokołów wyższego poziomu na bazie UART. Eksperymentowanie z różnymi prędkościami transmisji i formatami ramek pomoże lepiej zrozumieć możliwości i ograniczenia interfejsu UART w praktycznych zastosowaniach.
Klucz do efektywnej komunikacji: UART w ATmega8
Interfejs UART w mikrokontrolerze ATmega8 otwiera szerokie możliwości komunikacji szeregowej w projektach embedded. Od podstawowej konfiguracji rejestrów, przez implementację funkcji nadawania i odbierania, aż po zaawansowane techniki wykorzystujące przerwania - każdy aspekt UART ma kluczowe znaczenie dla sukcesu projektu.
Zrozumienie typowych problemów i metod debugowania UART pozwala na szybkie rozwiązywanie trudności, które mogą pojawić się podczas pracy z tym interfejsem. Wykorzystanie oscyloskopu, terminala szeregowego czy nawet prostych diod LED jako narzędzi diagnostycznych znacząco ułatwia proces rozwoju aplikacji.
Prezentowany przykładowy kod stanowi solidny fundament, na którym można budować bardziej zaawansowane rozwiązania. Systematyczne podejście do nauki UART, od podstaw po zaawansowane techniki, pozwala na stopniowe zwiększanie złożoności projektów i efektywne wykorzystanie potencjału ATmega8 w komunikacji szeregowej.