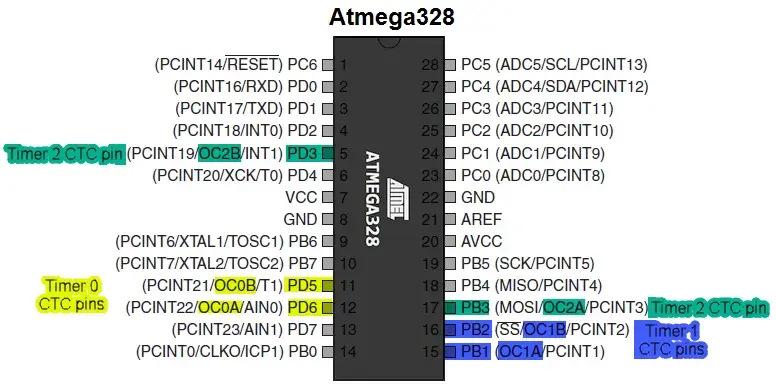
ATmega328P to popularny mikrokontroler wykorzystywany w platformie Arduino, wyposażony w trzy timery - dwa 8-bitowe i jeden 16-bitowy. Timery te stanowią kluczowy element w projektowaniu systemów wbudowanych. Umożliwiają precyzyjne zarządzanie czasem. Działają w różnych trybach pracy. Generują sygnały PWM. Mierzą częstotliwości.
Każdy timer może pracować w kilku podstawowych trybach. Normal Mode pozwala na liczenie w górę do maksymalnej wartości. CTC Mode umożliwia generowanie regularnych przerwań. PWM Mode służy do sterowania urządzeniami zewnętrznymi. Precyzyjne obliczenia czasowe są możliwe dzięki systemowi preskalerów i odpowiednim rejestrom.
Najważniejsze informacje:- ATmega328P posiada 2 timery 8-bitowe i 1 timer 16-bitowy
- Podstawowe tryby pracy to Normal Mode, CTC Mode i PWM Mode
- Timer 16-bitowy może liczyć do wartości 65535
- Preskaler umożliwia dostosowanie częstotliwości taktowania timera
- Dostępne są specjalne kalkulatory online ułatwiające obliczenia
- Timery są niezbędne do generowania precyzyjnych opóźnień czasowych
- PWM Mode pozwala na sterowanie silnikami i innymi urządzeniami
Kalkulator Timer ATmega328P - Narzędzia Online
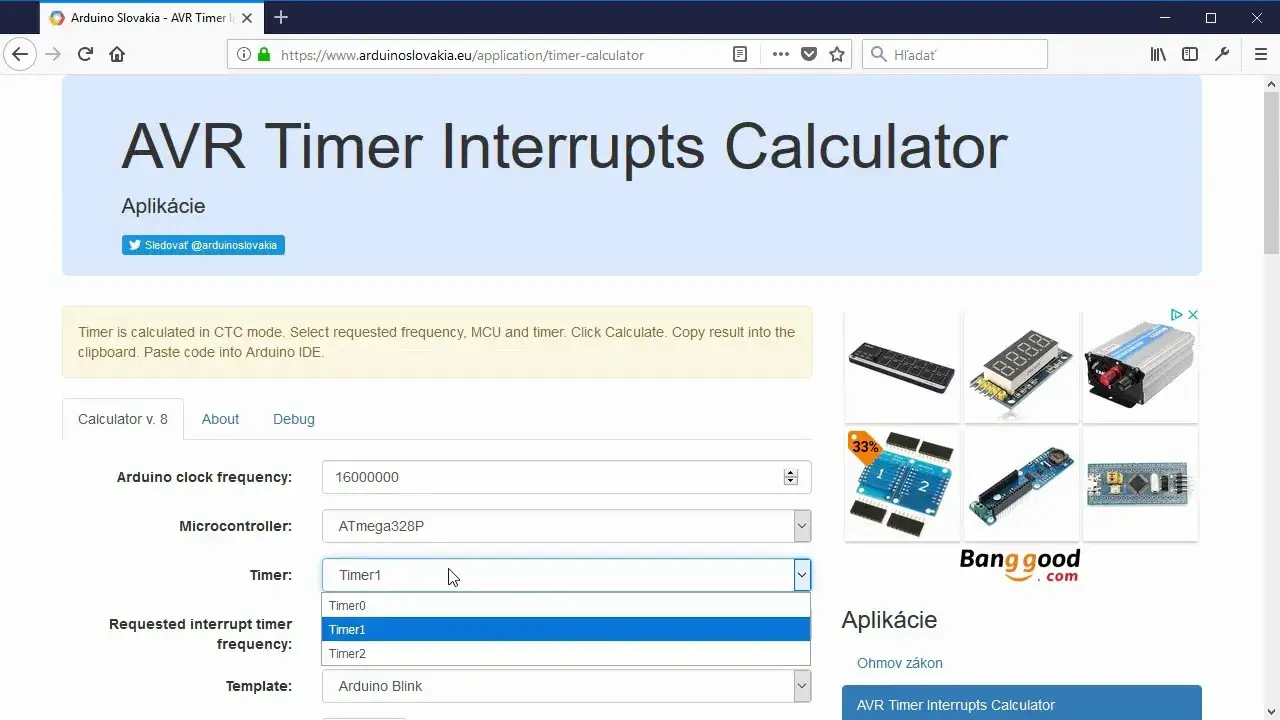
Dla ATmega328P timer calculator dostępnych jest kilka profesjonalnych narzędzi online. Każde z nich oferuje różne funkcje i interfejsy użytkownika. Wszystkie kalkulatory są bezpłatne i dostępne przez przeglądarkę internetową.
- Arduino Timer Calculator - podstawowy kalkulator timer AVR z intuicyjnym interfejsem
- DeepBlue Timer Tool - zaawansowany generator kodu timer ATmega328P
- AVR Calculator Pro - specjalistyczny kalkulator prescaler ATmega328P
Arduino Timer Calculator wyróżnia się prostotą obsługi i automatycznym doborem preskalera. DeepBlue Timer Tool generuje gotowy kod w C, podczas gdy AVR Calculator Pro oferuje szczegółową analizę czasową.
Jak używać kalkulatora timer ATmega328P?
Rozpocznij od wyboru częstotliwości taktowania mikrokontrolera. Następnie określ żądany czas przerwania lub szerokość impulsu PWM. Wprowadź dodatkowe parametry, takie jak tryb pracy timera i wartość preskalera.
Kalkulator automatycznie obliczy wszystkie niezbędne wartości rejestrów. Wygenerowany kod można bezpośrednio skopiować do projektu Arduino.Parametry Wejściowe Kalkulatora Timer
| Parametr | Opis |
| Częstotliwość CPU | Typowo 16 MHz dla Arduino Uno |
| Prescaler | Dostępne wartości: 1, 8, 64, 256, 1024 |
| Czas | Żądany czas w ms lub us |
Częstotliwość CPU wpływa bezpośrednio na precyzję timera. Prescaler dzieli częstotliwość bazową, umożliwiając dłuższe odmierzanie czasu. Dokładny czas określa finalną wartość rejestru.
Jak dobrać prescaler w ATmega328P?
Dobór preskalera w konfiguracji timer ATmega328P zależy od wymaganego czasu. Dla krótkich okresów (poniżej 1ms) najlepiej sprawdzi się prescaler 1 lub 8. Przy dłuższych czasach niezbędne są wyższe wartości preskalera. Główną zasadą jest wybór najmniejszej wartości, która pozwoli osiągnąć żądany czas bez przepełnienia licznika.
Precyzyjna konfiguracja timer Arduino Uno wymaga uwzględnienia kilku czynników. Zbyt mały prescaler może powodować szybkie przepełnienie licznika. Zbyt duży zmniejsza rozdzielczość czasową.
W standardowych projektach Arduino najczęściej używa się preskalera 64 dla czasów milisekundowych i 256 dla sekundowych.
Czytaj więcej: ESP8266 Arduino: Jak zacząć programować IoT - kompletny tutorial
Interpretacja Wyników Kalkulatora
Wyniki z ATmega328P timer calculator zawierają wartości rejestrów TCNT, OCR i TCCR. Każda z tych wartości musi być prawidłowo zinterpretowana i wprowadzona do kodu.
Rejestry konfiguracyjne określają tryb pracy, źródło sygnału zegarowego i wartości graniczne.
- TCNT - aktualny stan licznika timera
- OCR - wartość porównawcza dla trybu CTC
- TCCR - konfiguracja trybu pracy i preskalera
- TIMSK - ustawienia przerwań timera
Rzeczywisty vs Teoretyczny Czas Timera
Rzeczywisty czas działania timera może różnić się od teoretycznych obliczeń. Wpływają na to wahania częstotliwości zegara, opóźnienia wykonania przerwań i niedokładności preskalera. Na przykład, przy czasie 1s różnica może wynosić nawet kilka milisekund.
Dokładność timera zależy od stabilności źródła zegara. Temperatura i napięcie zasilania mogą wprowadzać dodatkowe odchylenia.
Błędy można kompensować przez kalibrację i korektę wartości rejestrów. Praktyczne testy pozwalają określić rzeczywiste odchylenia.
Zastosowanie Praktyczne - Tryb Normal
Obliczenia timer Arduino w trybie Normal są najprostsze do zaimplementowania. Timer liczy od zera do przepełnienia. Przerwanie następuje przy osiągnięciu maksymalnej wartości.
Tryb Normal świetnie sprawdza się w podstawowych zastosowaniach czasowych. Pozwala na łatwe generowanie regularnych przerwań. Nie wymaga skomplikowanej konfiguracji rejestrów.
Należy pamiętać o właściwym doborze preskalera dla tego trybu. Czas przepełnienia musi być krótszy niż żądany okres przerwań.
Przykład kodu dla 1ms w trybie Normal: TCCR1B |= (1 << CS11) | (1 << CS10); // prescaler 64 TIMSK1 |= (1 << TOIE1); // włączenie przerwania
Implementacja Trybu CTC
Tryb CTC zapewnia większą precyzję niż Normal. Timer resetuje się po osiągnięciu wartości porównawczej. Eliminuje to problem zmiennego czasu przepełnienia.
Konfiguracja wymaga ustawienia rejestru OCR na odpowiednią wartość. Przerwanie generowane jest dokładnie w momencie porównania.
Przykładowa implementacja: OCR1A = 249; // wartość porównania TCCR1B |= (1 << WGM12) | (1 << CS12); // CTC mode, prescaler 256 TIMSK1 |= (1 << OCIE1A); // przerwanie compare match
Konfiguracja Trybu PWM
Tryb PWM w ustawienia timer Arduino Uno służy do generowania sygnałów modulowanych. Najczęściej wykorzystuje się go do sterowania silnikami, diodami LED lub serwomechanizmami. Timer automatycznie generuje sygnał o zadanym wypełnieniu.Konfiguracja PWM wymaga ustawienia częstotliwości bazowej i wypełnienia. Istotny jest dobór odpowiedniego preskalera dla uzyskania żądanej częstotliwości.
| Zastosowanie | Częstotliwość | Typowy prescaler |
| Silniki DC | 490 Hz | 64 |
| Servo | 50 Hz | 256 |
| LED | 980 Hz | 8 |
Podstawowa konfiguracja PWM: TCCR1A |= (1 << COM1A1) | (1 << WGM11); TCCR1B |= (1 << WGM13) | (1 << CS11);
Efektywne Wykorzystanie Kalkulatora Timer ATmega328P
Kalkulator timer ATmega328P stanowi niezbędne narzędzie w programowaniu mikrokontrolerów Arduino. Pozwala na precyzyjne obliczenia czasowe i generowanie sygnałów PWM. Dostępne online kalkulatory znacząco upraszczają proces konfiguracji timerów.Kluczem do sukcesu jest właściwy dobór parametrów wejściowych. Częstotliwość CPU, prescaler i żądany czas muszą być starannie dobrane. Obliczenia timer Arduino wymagają szczególnej uwagi przy wyborze preskalera, który bezpośrednio wpływa na dokładność odmierzanego czasu.
Każdy z trzech trybów pracy - Normal, CTC i PWM - ma swoje specyficzne zastosowania. Normal sprawdza się w prostych aplikacjach czasowych, CTC oferuje większą precyzję, a PWM umożliwia sterowanie urządzeniami zewnętrznymi. Praktyczne przykłady kodu pokazują, że konfiguracja timer ATmega328P może być prosta i efektywna przy użyciu odpowiednich narzędzi obliczeniowych.